前ページでは、回転表現の一つとして四元数の概念を学び、恒等変換以外の対称性を有しない物体に対して、ランダムな方位状態における角度差の分布を考えました。ここでは、もう一つの重要な回転表現であるロドリゲス空間の概念を説明し、さらに回転対称による「押し込み」という考え方を紹介します。
ロドリゲス空間とは
3次元ロドリゲス (Rodrigues) 空間 (以降は単にロドリゲス空間) とは、回転軸の方向と回転量を表現する空間です。この空間中の点は \(\textbf{r}=(x,y,z)\) のように3変数で表します。ノルムは \( \|\textbf{r}\| = \sqrt{x^2+y^2+z^2}\) と定義されますが、超頻出するのでさらに \(\rho = \|\textbf{r}\| \) とも定義しておきます。ロドリゲス空間の座標 \((x,y,z)\) は
- 回転軸の方向は \((x,y,z)\)
- 回転量 \(\theta\) は \( 2\arctan(\|\textbf{r}\|) = 2\arctan(\rho) \) (すなわち \(\tan\frac{\theta}{2} = \rho\))
を意味します。 例えば \( (1,0,0) \) という座標は 「X軸を回転軸として90度回転」、 \( (1,1,1) \) という座標は「X,Y,Zの合成ベクトルを回転軸として120度 (=\(2\arctan(\sqrt{3})\)) 回転 」という意味になります。

ロドリゲス座標 (\(\textbf{r}\) とする) と前ページで説明した単位四元数 (\(q\) とする) とは、$$
\textbf{r}=(x,y,z) \quad \leftrightarrow \quad q = \frac{1}{\sqrt{1+x^2+y^2+z^2}}( 1 ,x ,y, z ) =\frac{1}{\sqrt{1+\rho^2}}( 1 ,\textbf{r} ) $$あるいは$$
\textbf{r}=\tan\frac{\theta}{2}(x, y, z) \quad \leftrightarrow \quad q = (\cos\frac{\theta}{2}, x\sin\frac{\theta}{2},y\sin\frac{\theta}{2},z\sin\frac{\theta}{2}) =\cos\frac{\theta}{2}(1, \textbf{r}) \quad \textrm{where}\ x^2+y^2+z^2=1 $$あるいは$$
\textbf{r}=\frac{\textbf{v}}{s} \quad \leftrightarrow \quad q=(s,\textbf{v}) \quad \textrm{where}\ s^2+\|\textbf{v}\|^2=1 $$
という見通しの良い関係になります。
ロドリゲス空間における演算
ロドリゲス空間における二つの座標の乗算は回転の合成に対応します。ロドリゲス空間上の座標 \(\textbf{r}_1, \textbf{r}_2\)を
$$\textbf{r}_1=(x_1,y_1,z_1),\quad \textbf{r}_2=(x_2,y_2,z_2)
$$のように定義し、さらに \(\rho_1 = \|\textbf{r}_1\|,\ \rho_2 = \|\textbf{r}_2\| \) としたとき、それらに対応する四元数 \(q_1, q_2\)は$$
q_1=\frac{1}{\sqrt{1+\rho_1^2}}(1,\,\textbf{r}_1),\qquad q_2=\frac{1}{\sqrt{1+\rho_2^2}}(1,\,\textbf{r}_2)
$$ となります。四元数の積 (\(q=q_1q_2\)) は前ページで説明した通り $$
q=q_1q_2=\frac{1}{\sqrt{(1+\rho_1^2)(1+\rho_2^2)}} \left( 1-\textbf{r}_1\cdot \textbf{r}_2,\ \textbf{r}_1+\textbf{r}_2+\textbf{r}_1\times \textbf{r}_2 \right) \\
= \frac{1}{(1-\textbf{r}_1\cdot \textbf{r}_2) \sqrt{(1+\rho_1^2)(1+\rho_2^2)}} (1, \ \frac{\textbf{r}_1+\textbf{r}_2+\textbf{r}_1\times \textbf{r}_2}{1-\textbf{r}_1\cdot \textbf{r}_2})
$$ですから、回転の合成によって得られるロドリゲス座標 \(\textbf{r}\) は$$
\textbf{r} = \textbf{r}_1\otimes \textbf{r}_2 = \frac{\textbf{r}_1+\textbf{r}_2+\textbf{r}_1\times \textbf{r}_2}{1-\textbf{r}_1\cdot \textbf{r}_2}
$$と求まります。なお、ロドリゲス空間における乗算の記号を \(\otimes\) と表記しました。この式から明らかなように、\(1-\textbf{r}_1\cdot \textbf{r}_2=0\) のとき、合成回転の四元数のスカラー部が 0 になり、回転角が 180 度になります。このときロドリゲス座標は \( \rho \to\infty\) に飛びます。
逆元については、四元数では共役 \(q^{-1}=q^*\) に対応するので、ロドリゲス空間では単に$$\textbf{r}^{-1}=-\textbf{r}$$となります。回転量 (原点からの距離に対応) は同じで回転軸が正反対になるということです。この結果、二つのロドリゲス座標 \(\textbf{r}_1,\textbf{r}_2\) の方位差 (ミスオリエンテーション) \(\Delta\)は$$\Delta \textbf{r} = \textbf{r}_1^{-1}\otimes \textbf{r}_2 = (-\textbf{r}_1)\otimes \textbf{r}_2 = \frac{-\textbf{r}_1+\textbf{r}_2-\textbf{r}_1\times \textbf{r}_2}{1+\textbf{r}_1\cdot \textbf{r}_2}$$と書けます。
ロドリゲス空間における \(SO(3)\) の分布
ロドリゲス空間は、単位四元数と同じく、\(SO(3)\) を表現する空間なのですが、重要な注意点があります。それは、\(SO(3)\) がロドリゲス空間中に一様に分布していない1ということです。このことは、180度回転という状態がロドリゲス空間では無限遠の点に対応する、ということからも容易に理解できると思います。それでは\(SO(3)\) はロドリゲス空間にどのような密度で分布しているでしょうか。結論から言うと、これは四元数\(S^3\)の一様分布からロドリゲス空間への写像に関するヤコビアンを算出するという問題です。詳しい説明は次のページに譲ります2が、この密度関数 \(P\) は\(\rho= \|\mathbf{r})\| \) の関数となっており、その形式は $$ P(\rho) = \frac{1}{\pi^2(1+ \rho^2)^2}$$となります。
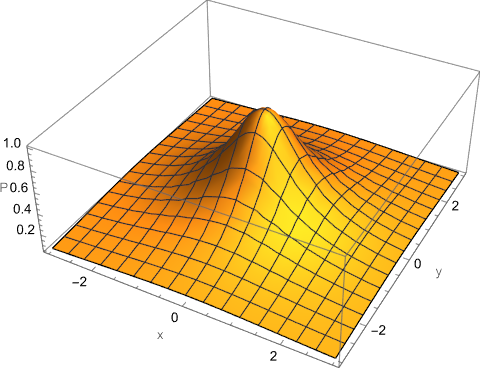
\(z=0\) の \(P(\rho)\) の形状3
ロドリゲス空間の原点から \(\rho\) 離れた点集合が作る球の面積は \(4\pi\rho^2\) であり、この球面上に存在する \(SO(3)\) 密度は \(\pi^{-2}(1+\rho^2)^{-2}\)に比例しますから、方位差分布関数 \(F\) は$$F(\rho) = \frac{4\rho^2}{\pi(1+ \rho^2)^2}$$ということになります。\( \rho=\tan(\theta/2)\) を代入し\(F(\theta)\)として書き直すと$$
\frac{d\rho}{d\theta}=\frac{1}{2}(1+\rho^2)\\
F(\theta) = F(\rho)\frac{d\rho}{d\theta} = \frac{2 \rho^2}{\pi(1+ \rho^2)}=\frac{2}{\pi}\frac{\tan^2\frac{\theta}{2}}{1+ \tan^2\frac{\theta}{2}}=\frac{2}{\pi}\sin^2\frac{\theta}{2} = \frac{1-\cos\theta}{\pi}$$となり、前のページで示した式と一致します。
対称要素によるロドリゲス空間の押し込み
ここでは回転対称がロドリゲス空間中の密度関数にどのような影響を与えるのか、見ていきましょう。
\(2\) 回回転の場合
まず最も簡単な例として、2回回転を考えます。ロドリゲス空間におけるX軸に沿った2回回転 (180度回転) 操作 \(\textbf{C}_2\) は$$\textbf{C}_2= \lim_{A \to \infty}(A, 0,0)$$ と表現できます。この操作によって、ロドリゲス空間中のある点 \(\textbf{r} =(x,y,z)\) が別の点 \(\textbf{r}’=(u,v,w)\) に写されるとしましょう。回転の合成の式を適用すると \(\textbf{r}’\) は以下のように表せます。$$
\textbf{r}’ = (u,v,w) = \textbf{C}_2 \otimes \textbf{r} = (-\frac{1}{x},\frac{z}{x},-\frac{y}{x})
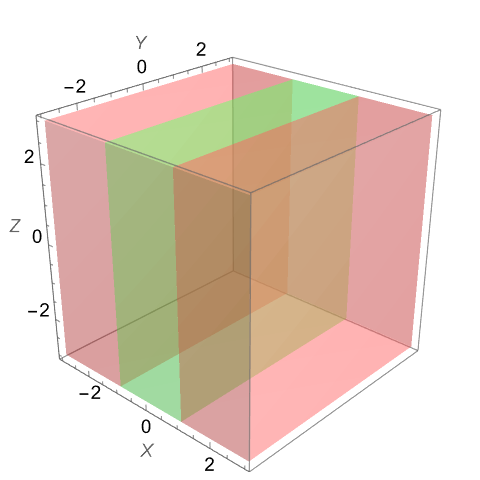
$$ この式を見ると、\(|x| \ge 1\) のとき、\(|u| \le 1\) となることがわかります4。つまり、次の図5のように、\(|x| \ge 1\) の領域 (図の赤) は対称操作によって \( |x| \le 1\) の領域 (図の緑) に押し込まれるため、わざわざ考慮する必要がないのです。
さて、\( |x| \le 1\) の領域だけを考えればよいことはわかりましたが、 \(|x| \ge 1\) から押し込まれた点が \(|x’| \le 1\) 領域の \(SO(3)\) 密度関数 \(P(\rho)\) を乱してしまうかもしれません。一応これもチェックしておきましょう。まず、\(\mathbf{r} \to \mathbf{r}’\) という変換のヤコビアンは$$
\det \left[\frac{\partial(u,v,w) }{\partial(x,y,z)}\right] = \frac{1}{x^4}
$$となります6。つまり変換前後の各点周囲の微小体積の変化率\( \large \frac{du\ dv\ dw}{dx\ dy\ dz}\)は\(x^{-4}\) となります。一方、変換前後の \(SO(3)\) 分布密度は\(P(\rho)= \large \frac{1}{\pi^2(1+ \rho^2)^2}\) から \(P(\rho’)=\large \frac{1}{\pi^2(1+\rho’^2)^2}\) へと変化するので、その変化率は$$
\frac{(1+ \rho^2)^2}{(1+ \rho’^2)^2}=
\left(\frac{1+ x^2+y^2+z^2}{1+ \frac{1+y^2+z^2}{x^2} }\right)^2=x^4
$$となります。変換によってある点の周りの微小体積は \(x^{-4}\) 倍に変化するから密度は \(x^4\) 倍となるのですが、変換前後の密度関数\(P(\rho)\) の変化がそもそも \(x^4\) 倍なので、その部分に注目すれば密度は2倍になります。そして、\(|x| \ge 1\) から \( |x| \le 1\) への押し込みには重なりはありませんので、\(|x| \ge 1\) 全領域を押し込むことによって \( |x| \le 1\) 内の 密度 \(P(\rho)\) は、 (形状は乱されることなく) 全体一様に2倍となると結論できます。
\(n\) 回回転の場合
最後に回転対称の次数を \(n\) と一般化して、この対称要素による押し込みによって密度関数 \(P(\rho)\) や範囲がどうなるかを示します。回転軸は何を選んでも一般性を失いませんので、X軸に沿って角度 \(\large \frac{2k\pi}{n}\) で回す操作 (ただし \(k\) は \(0 \sim n-1\) の整数) を考えます。この操作によってロドリゲス空間中の点が \(\textbf{r} =(x,y,z) \to \textbf{r}’=(u,v,w)\) に写されたとすると、その関係は \(\theta_k = \large \frac{k\pi}{n}\) として$$
(u,v,w) = (\frac{x+\tan\theta_k}{1-x\tan\theta_k},\frac{y-z\tan\theta_k}{1-x\tan\theta_k},\frac{z+y\tan\theta_k}{1-x\tan\theta_k})
$$となります。この変換のヤコビアン7を求めると \(\large \frac {(1+\tan^2\theta_k)^2}{(1-x \tan\theta_k)^4}\) となります。一方、密度関数に関しては$$
P(\rho’) = \left[\frac{1}{\pi(1+u^2+v^2+w^2)}\right]^2 = \left[\frac{(1-x\tan\theta_k)^2} {\pi(1+x^2+y^2+z^2)(1+\tan^2\theta_k)}\right]^2 = P(\rho) \frac{(1-x\tan\theta_k)^4} {(1+\tan^2\theta_k)^2}
$$となりますので、2回回転の議論と同様、密度関数 \(P(\rho)\) は全体一様に定数倍になるだけです。
どの範囲に押し込まれるかも考えましょう。X座標に注目し、さらに \(x=\tan\alpha\) (\(0 \le \alpha \le \pi/2\)) と置き換えることにします。すると、三角関数の加法定理を利用して、$$ u= \frac{x+\tan\theta_k}{1-x\tan\theta_k}=\frac{\tan\alpha+\tan\theta_k}{1-\tan\alpha\tan\theta_k} =\tan(\alpha+\theta_k)=\tan(\alpha+\frac{k\pi}{n})
$$という美しい関係が得られます。したがって、X軸に沿った \(n\) 回回転によって等価となる点集合のX座標だけを書き連ねると、$$
\tan(\alpha),\ \tan(\alpha+\frac{\pi}{n}),\ …\ ,\tan(\alpha+\frac{n-2}{n}\pi),\ \tan(\alpha+\frac{n-1}{n}\pi)
$$となります。これらは正接関数 (tangent) を等間隔の角度 \(\large \frac{\pi}{n}\) で区切った数列ですから、\(-\tan\frac{\pi}{2n}\sim \tan\frac{\pi}{2n}\) の範囲の数値が必ず1つは含まれているはずです。それを等価点の代表とみなし \(|x|\ge\tan\frac{\pi}{2n}\) からすべての点を押し込めば、あとは \(|x|\le\tan\frac{\pi}{2n}\) だけを考えればいい、となるわけです。
以上の話をまとめると、次のようになります。 ある軸に沿った \(n\) 回回転によって、ロドリゲス空間はその軸を法線とする二つの平面に挟まれた領域に押し込まれ、領域内の方位密度関数は \(n\) 倍となる。二つの平面は原点対称であり原点との距離は\(\tan(\pi/2n)\) である。
次のページでは具体的な点群を例に挙げ、方位差分布関数を求めていきます。
脚注
- 正確に言うと、ハール測度 (Haar measure)が一様でないということです。前のページで説明したとおり、\(SO(3)\) は単位四元数として \(S^3\)上に一様分布します。一様分布を表現するにはどうしても4次元が必要なのです。 ↩︎
- 直観的には \( r=(x,y,z) \ \leftrightarrow \ q = (1+\|r\|^2)^{-\frac{1}{2}}( 1 ,x ,y, z )\) という関係式が示す通り、ロドリゲス空間上のある座標の近辺が占める体積は \(S^3\) (Haar測度一様) 上ではスケール因子\((1+\|r\|^2)^{-\frac{1}{2}}\) の4乗 (4次元だから)の体積に変化するということです。 ↩︎
- Mathematicaで
Plot3D[Pxy[x, y], {x, -3, 3}, {y, -3, 3}, PlotRange -> All, AxesLabel -> {“x”, “y”, “P”}] ↩︎ - 等号が成り立つのは \(x=1\) の場合のみ。 ↩︎
- Mathematicaで
L = 3;
RegionPlot3D[{Abs[x] > 1, Abs[x] < 1}, {x, -L, L}, {y, -L, L}, {z, -L, L}, PlotStyle -> {Directive[Red, Opacity[0.25]], Directive[Green, Opacity[0.25]]}, Mesh -> None, BoundaryStyle -> None, Axes -> True, Boxed -> True, AxesLabel -> (Style[#, Italic, 14] & /@ {“X”, “Y”, “Z”}), LabelStyle -> Directive[14], ViewPoint -> {2.2, -2.4, 1.6}, SphericalRegion -> True, Lighting -> “Neutral”, PlotPoints -> 40, MaxRecursion -> 2] ↩︎ - ちゃんと求めると、ヤコビ行列$$
J= \frac{\partial(x’,y’,z’)}{\partial(x,y,z)}
=\begin{pmatrix}
\frac{\partial u}{\partial x} & \frac{\partial u}{\partial y} & \frac{\partial u}{\partial z}\\
\frac{\partial v}{\partial x} & \frac{\partial v}{\partial y} & \frac{\partial v}{\partial z}\\
\frac{\partial w}{\partial x} & \frac{\partial w}{\partial y} & \frac{\partial w}{\partial z}
\end{pmatrix}
=\begin{pmatrix}
x^{-2} & 0 & 0 \\
-z x^{-2} & 0 & -x^{-1}\\
y x^{-2} & x^{-1} & 0
\end{pmatrix} $$となり、これの行列式は容易に \(x^{-4}\) と求まります。 ↩︎ - ヤコビ行列は$$
J= \begin{pmatrix}
\frac{1+tan^2\theta_k}{(1-x\tan\theta_k)^2} & 0 & 0 \\
\frac{\tan\theta_k (y-z \tan\theta_k)}{(1-x\tan\theta_k)^2} & \frac{1}{1-x\tan\theta_k} & -\frac{\tan\theta_k}{1-x\tan\theta_k}\\
\frac{\tan\theta_k (z+y\tan\theta_k) }{(1-x\tan\theta_k)^2} & \frac{\tan\theta_k}{1-x\tan\theta_k} & \frac{1}{1-x\tan\theta_k}
\end{pmatrix}
$$です。先ほどよりは複雑ですが、2列目と3列目で外積を取ってから、1列目と内積を取れば比較的簡単に答えが出ます。 ↩︎