What is a Group?
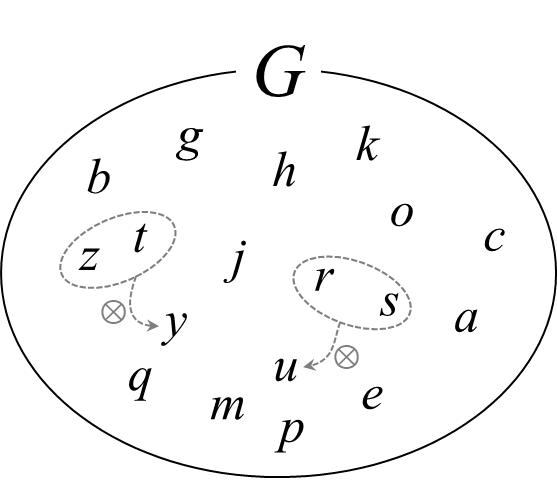
Consider a non-empty set \(G\), where elements contained within it are called elements (element). An operation (operation, denoted as \(\otimes\)) is defined between elements, and the result of this operation is always contained in the set \(G\). When such a set \(G\) satisfies the following three conditions, that set is called a group.
- Associativity: For any elements \(g, h, k\), the equation \( g \otimes (h\otimes k)=(g\otimes h)\otimes k \) is satisfied.
- Existence of Identity Element: For any element \(g\), there exists an element \(e\) such that \(g \otimes e = e \otimes g =g \) (this \(e\) is called the identity element).
- Existence of Inverse Element: For any element \(g\), there exists an element \(x\) such that \(g \otimes x = x \otimes g = e\) (this \(x\) is called the inverse element of \(g\), denoted as \(g^{-1}\)).
A set containing only the identity element \(e\) is also a group, and there can be groups with infinitely many elements. An element and its inverse may be identical. Furthermore, when the following condition is satisfied, it is called an abelian group or commutative group.
- Commutativity: For any elements \(g, h\), the equation \( g \otimes h =h \otimes g \) is satisfied.
The abstract definition is difficult to understand. Let us examine the properties of groups with concrete examples.
Groups with Matrices as Elements
Matrices are linear algebra representations in which products and sums can be defined. Since matrix multiplication and addition satisfy condition 1 (associativity), we can form a group by appropriately collecting matrices. Hereinafter, all matrices are square matrices, and the group operation is multiplication. Also, to avoid redundancy in writing the operation symbol (\(\otimes\)), we will omit it. When matrices are written consecutively, understand that this represents multiplication.
If there is a group with matrices as elements, it must necessarily contain the identity matrix (condition 2: existence of identity element). Furthermore, since every element must have an inverse element (condition 3: existence of inverse element), it must consist of regular matrices (= matrices with inverses = matrices with non-zero determinant). Of course, the fundamental premise is that when any two elements from the group are multiplied together, the result must coincide with some element of the group. Since matrix multiplication is not commutative (changing the order of multiplication can change the result), it does not necessarily satisfy condition 4 (commutativity).
Examples
Based on the above, let us examine concrete examples. For instance, a set containing only one 4×4 identity matrix (\(e\)) forms a group. The inverse of the identity matrix is itself. $$ \begin{pmatrix}1&0&0&0 \\ 0&1&0&0 \\ 0&0&1&0 \\ 0&0&0&1 \end{pmatrix} $$
A set containing two matrices—the identity matrix (\(e\)) and a matrix with all signs changed (\(-e\))—also forms a group. Each is its own inverse element. $$ \begin{pmatrix}1&0&0&0 \\ 0&1&0&0 \\ 0&0&1&0 \\ 0&0&0&1 \end{pmatrix} ,\ \ \begin{pmatrix}-1&0&0&0 \\ 0&-1&0&0 \\ 0&0&-1&0 \\ 0&0&0&-1 \end{pmatrix} $$
The following four matrices also form a group. The last two are mutually inverse elements of each other.$$ \begin{pmatrix}1&0&0&0 \\ 0&1&0&0 \\ 0&0&1&0 \\ 0&0&0&1 \end{pmatrix} ,\ \ \begin{pmatrix}-1&0&0&0 \\ 0&-1&0&0 \\ 0&0&1&0 \\ 0&0&0&1 \end{pmatrix} ,\ \ \begin{pmatrix}0&1&0&0 \\ -1&0&0&0 \\ 0&0&1&0 \\ 0&0&0&1 \end{pmatrix} ,\ \ \begin{pmatrix}0&-1&0&0 \\ 1&0&0&0 \\ 0&0&1&0 \\ 0&0&0&1 \end{pmatrix} $$
The number of elements may be infinite. For example, the following set, where the entries in rows 1–3 of the 4th column are multiples of \(r\) (an arbitrary real number), also forms a group.$$ \cdots, \begin{pmatrix}1&0&0&-r \\ 0&1&0&-r \\ 0&0&1&-r \\ 0&0&0&1 \end{pmatrix} ,\ \ \begin{pmatrix}1&0&0&0 \\ 0&1&0&0 \\ 0&0&1&0 \\ 0&0&0&1 \end{pmatrix} ,\ \ \begin{pmatrix}1&0&0&r \\ 0&1&0&r \\ 0&0&1&r \\ 0&0&0&1 \end{pmatrix} ,\ \ \begin{pmatrix}1&0&0&2r \\ 0&1&0&2r \\ 0&0&1&2r \\ 0&0&0&1 \end{pmatrix} ,\ \ \cdots,$$
The number of elements contained in a group is called its order. In the example directly above, the order is infinite.
Generators
A generator is, as the name suggests, an element that generates a group. From a group \(G\), select as few elements as possible, \(s_1, s_2, \cdots\), and by multiplying them and their inverses \(s_1^{-1}, s_2^{-1}, \cdots\) any number of times (using the same element repeatedly is allowed), if we can cover all elements of group \(G\), then \(s_1, s_2, \cdots\) are called the generators of group \(G\).
For example, in the following case (assigning symbols \(s_1, s_2, \cdots\) for clarity), $$ s_1=\begin{pmatrix}1&0&0&0 \\ 0&1&0&0 \\ 0&0&1&0 \\ 0&0&0&1 \end{pmatrix} ,\ \ s_2=\begin{pmatrix}-1&0&0&0 \\ 0&-1&0&0 \\ 0&0&1&0 \\ 0&0&0&1 \end{pmatrix} ,\ \ s_3=\begin{pmatrix}0&1&0&0 \\ -1&0&0&0 \\ 0&0&1&0 \\ 0&0&0&1 \end{pmatrix} ,\ \ s_4=\begin{pmatrix}0&-1&0&0 \\ 1&0&0&0 \\ 0&0&1&0 \\ 0&0&0&1 \end{pmatrix} $$ If we select \(s_3\) and multiply it repeatedly, we find the relationship \(s_3^2 = s_2,\ s_3^3 = s_4,\ s_3^4= s_1\), so \(s_3\) can be said to be a generator of this group. Similarly, \(s_4\) is also a generator. On the other hand, \(s_2\) only produces \(s_1\) as \(s_2^2 =s_1, s_2^3 =s_2\), so it is not a generator of this group. Also, \(s_1\) (the identity element) only produces \(s_1\), so it is not a generator.
In the example above, either \(s_3\) or \(s_4\) is a generator. We only need to choose one; there is no need to choose both. When a group can be represented by only one generator, the group is said to be a cyclic group. The term “cyclic” might suggest limiting it to cases where the number of elements (order) is finite. However, even if a group has infinite order, if it has only one generator, it is a cyclic group. This is sometimes called an infinite cyclic group. For example, in the case of the group shown at the end of “Examples,” $$ \begin{pmatrix}1&0&0&-r \\ 0&1&0&-r \\ 0&0&1&-r \\ 0&0&0&1 \end{pmatrix} \ \ or \ \ \begin{pmatrix}1&0&0&r \\ 0&1&0&r \\ 0&0&1&r \\ 0&0&0&1 \end{pmatrix}$$is a generator.
Matrices and Symmetry Operations
As explained on another page, all symmetry operations can be expressed as Euclidean transformations using 4×4 regular matrices. Point groups and space groups are groups with symmetry operations as elements. The expression “operations are elements” is difficult to visualize. An operation acts on the coordinates of some object. Mapping the coordinates of an object to different coordinates by a certain operation is equivalent, in linear algebra, to multiplying the object’s coordinates by a square matrix of the same dimension. In other words, an “operation” acting on coordinates can be viewed as a “matrix” multiplied by the coordinates. Hereinafter, please understand that matrices are not merely numbers arranged in rows and columns, but rather possess the properties of symmetry operations.
Point Groups
A point group is a group formed by combining symmetry operations that do not include translation (parallel displacement) and that keep a fixed point (usually the origin) invariant. Symmetry operations without translation include rotation, rotoreflection, inversion, and reflection; when these are operations that keep the origin fixed, the 4th column of the affine transformation matrix is necessarily 0,0,0,1 1.
Symmetry operations without translation: \( \begin{pmatrix} A_{11} & A_{12} & A_{13} & 0\\ A_{21} & A_{22} & A_{23} & 0\\ A_{31} & A_{32} & A_{33} & 0\\ 0 & 0 & 0 & 1 \end{pmatrix} = \begin{pmatrix} \huge{A} & \begin{matrix}0\\0\\0\end{matrix} \\ \begin{matrix}0&0&0\end{matrix} & 1 \end{pmatrix}\)
No matter how we multiply matrices whose 4th row and column are 0,0,0,1, the 4th row and column remain 0,0,0,1. For simplicity, hereafter we will express symmetry operations using only the \(A\) portion.
Examples
For example, a symmetry with a 2-fold rotation axis coincident with the Z-axis can be said to be a group consisting of the following two matrices. The first represents the identity transformation (identity matrix), and the second represents a 180-degree rotation operation. This corresponds to point group 2.
In this way, by adding different symmetry elements to the original point group, we can successively generate other point groups.
Space Groups
Space groups extend point groups by including translational symmetry operations. A space group is a crystallographic group formed by combining point group operations with translation vectors.
Footnotes
- Translation without symmetry does not necessarily mean that the 4th column of the affine transformation matrix is 0,0,0,1. For example, reflection through a plane perpendicular to the Z-axis passing through Z=w can be expressed with a matrix that, when multiplied by itself twice, returns to the identity matrix. ↩︎