Symmetry and Symmetry Operations/Elements
Symmetry refers to the property that the state of an object remains completely unchanged (invariant) before and after a certain transformation is applied. Such a transformation is called a symmetry operation. In the park example on the previous page, the state of the park remained completely unchanged even after applying a translation operation (parallel displacement). In other words, the park is an object that possesses a translational element, which is a symmetry element. The terminology may be getting confusing, so the concepts of symmetry operations and symmetry elements are explained in detail below.
Classification and Properties of Symmetry Operations
A symmetry operation is an operation that leaves an object placed in space invariant. The detailed mathematical formulation and representation will be covered in Chapter 2; here, we will give a rough overview of various symmetry operations. Symmetry operations can be broadly divided into two types: “operations without translation” and “operations with translation.”
Operations Without Translation
Operations without translation always return to the original position after being repeated a certain number of times. In other words, there always exists a fixed point in space. Combining this type of operation yields what is known as a “point group,” which will be discussed in detail in a separate chapter.
| Identity | Do nothing (no movement) |
| Inversion | Take a point in space as the origin and reverse the sign of all x, y, z coordinates |
| Reflection | Transform as if reflecting in a mirror across a plane in space |
| Rotation | Rotate around a line in space as the axis |
| Rotoinversion | Perform a rotation, then apply an inversion through a point on the rotation axis |
Identity
This is the operation of “doing nothing.” You might think this is meaningless, but by recognizing this operation, the structure satisfies the requirements of a group.
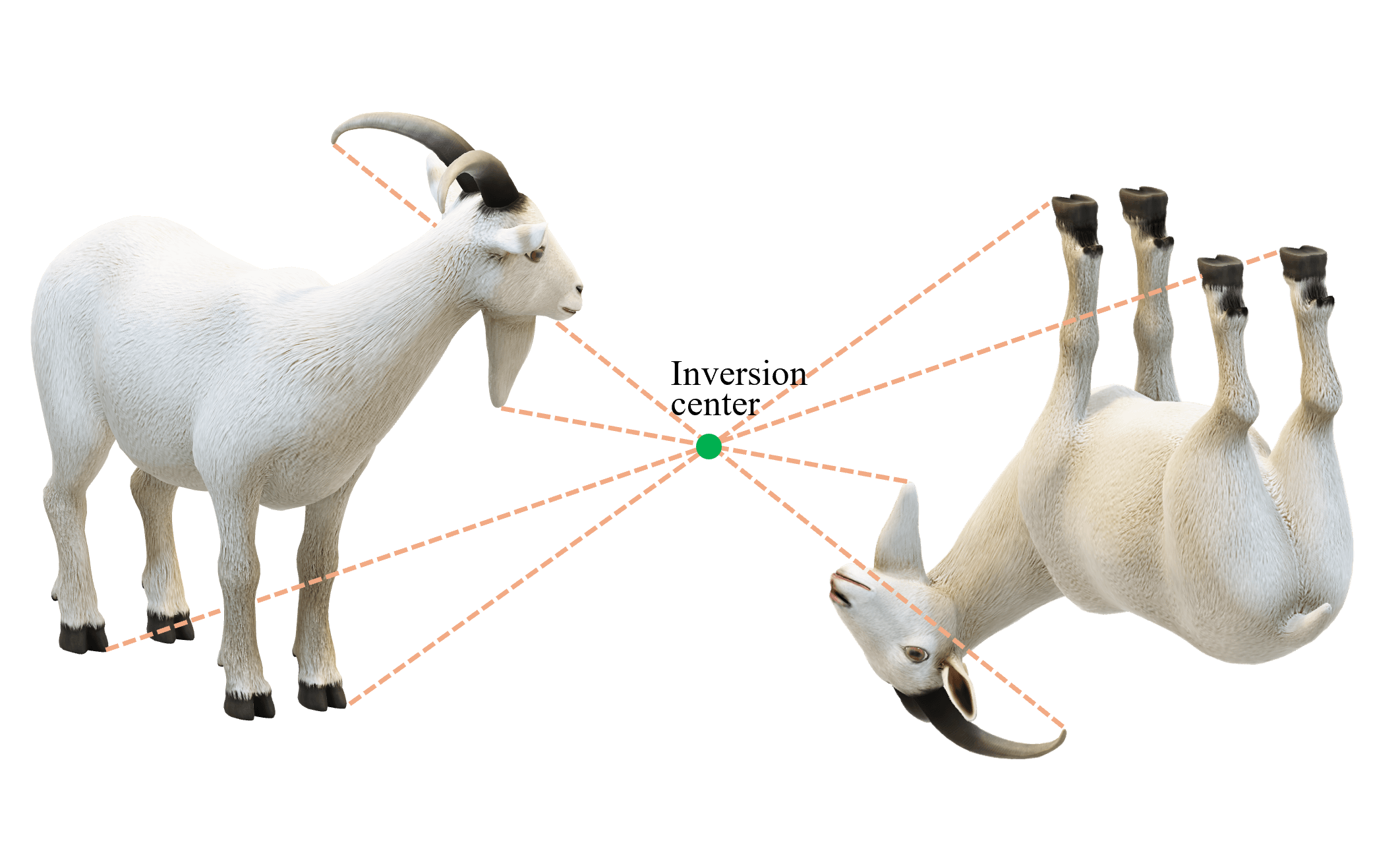
Inversion
This operation takes a point in space as the origin and reverses the sign of the x, y, z coordinates of all surrounding objects. A right hand is transformed into a left hand.
Repeating it twice returns everything to its original position.
Reflection
This operation reflects surrounding objects as in a mirror across a plane in space. This operation also transforms a right hand into a left hand.
Repeating it twice returns everything to its original position.

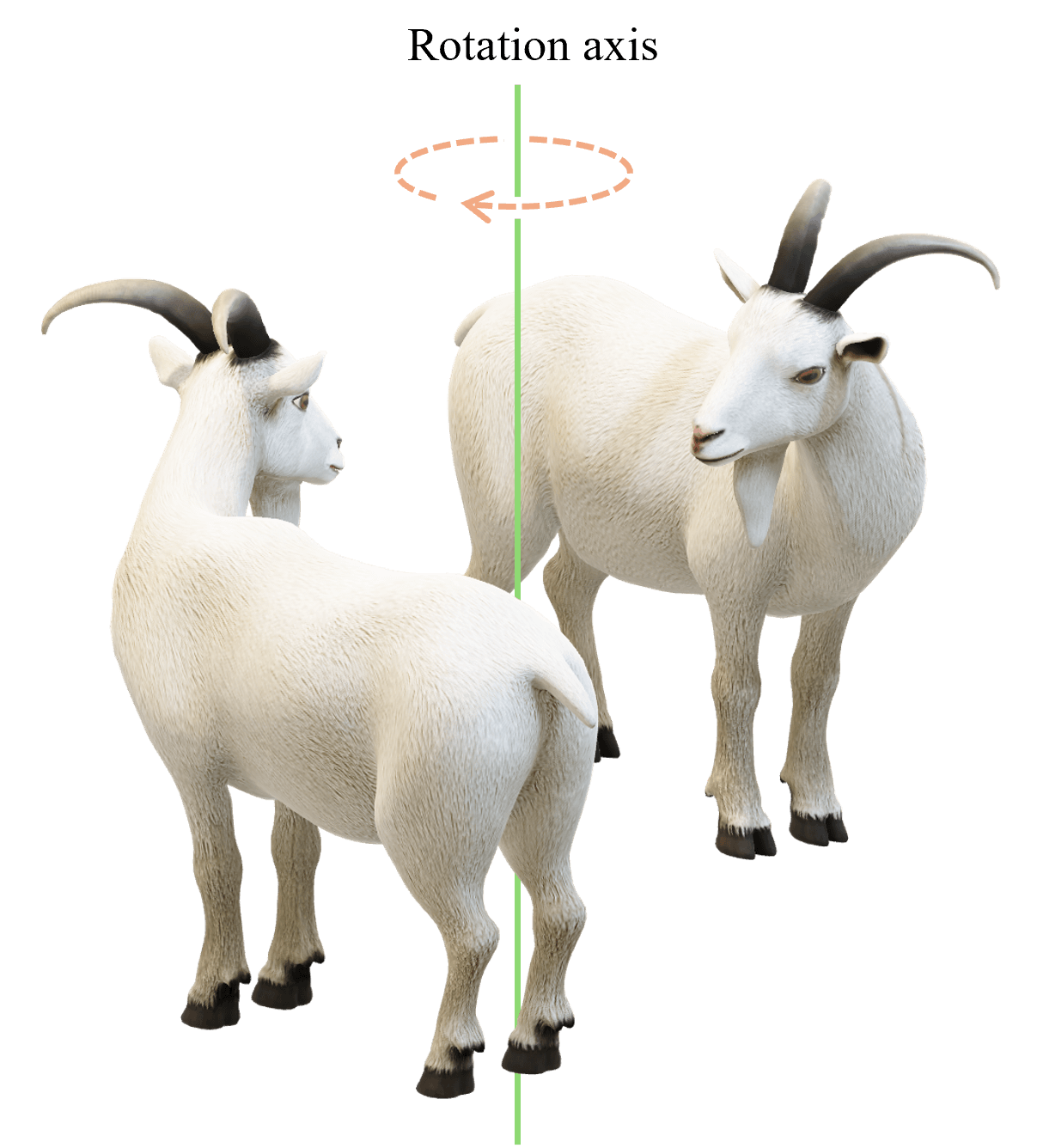
Rotation
This operation rotates objects around a line in space as the rotation axis. The rotation angle can generally take any value, but for crystals (figures with translational symmetry), the rotation angle is restricted to one of \(\frac{\pi}{3}\), \(\frac{\pi}{2}\), \(\frac{2\pi}{3}\), \(\pi\), \(\frac{4\pi}{3}\), \(\frac{3\pi}{2}\), \(\frac{5\pi}{3}\), \(2\pi\) (\(60^\circ\), \(90^\circ\), \(120^\circ\), \(180^\circ\), \(240^\circ\), \(270^\circ\), \(300^\circ\), \(360^\circ\)). This operation preserves a right hand as a right hand.
If the rotation angle is \(\theta\), repeating this operation \(n = 2\pi/\theta\) times returns everything to its original position. This \(n\) is defined as the order of the rotation. When \(n=1\), it means “doing nothing,” so it can be regarded as the identity operation.
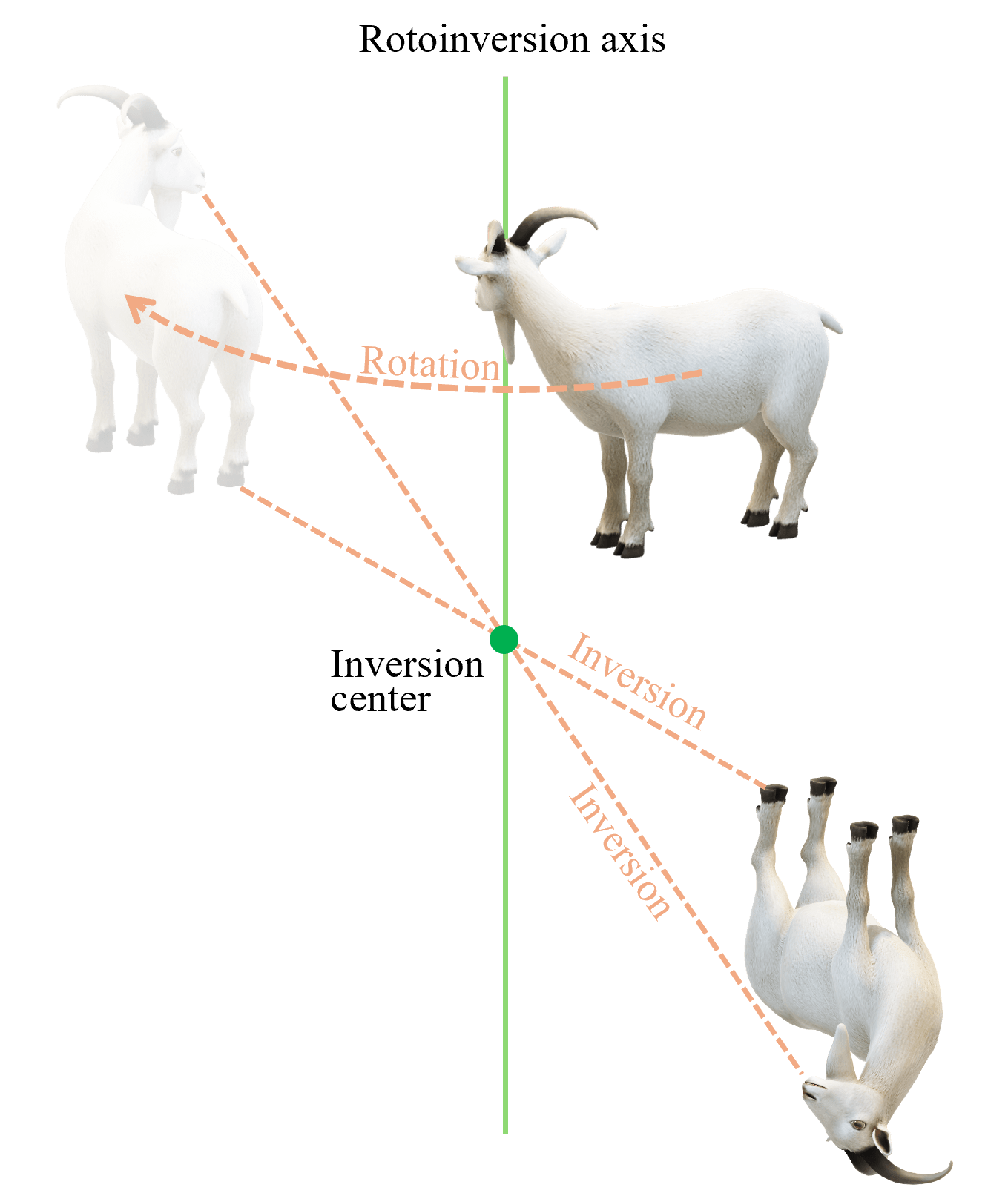
Rotoinversion
A rotoinversion operation consists of first performing a rotation, followed by an inversion through a point on the rotation axis. You might wonder why these must be performed “in succession” — why not just separate them into two operations? The reason is that recognizing (and naming) this sequence as a single independent operation simplifies many discussions.
This operation transforms a right hand into a left hand. For the same reason as explained for the rotation operation, when dealing with crystals, the rotation angle is restricted to one of \(\frac{\pi}{3}\), \(\frac{\pi}{2}\), \(\frac{2\pi}{3}\), \(\pi\), \(\frac{4\pi}{3}\), \(\frac{3\pi}{2}\), \(\frac{5\pi}{3}\), \(2\pi\). The order of a rotoinversion is also defined as \(n = 2\pi/\theta\), just as for rotations. If \(n\) is even, repeating this operation \(n\) times returns everything to its original position. If \(n\) is odd, repeating it \(2n\) times returns everything to the original position. When the order \(n=1\), it can be regarded as a simple inversion. When the order \(n=2\), it can be regarded as a reflection with the rotoinversion axis as the normal to the mirror plane.
Operations With Translation
Operations with translation move farther and farther from the original position upon repetition. There is no fixed point in space for this type of operation. A crystal necessarily possesses this type of operation, and conversely, if a figure possesses this type of operation, it is necessarily a crystal. The collection of operations with and without translation constitutes a space group.
| Lattice translation | Simple parallel displacement |
| Screw | A rotation followed by a translation along the rotation axis |
| Glide | A reflection followed by a translation along the mirror plane |
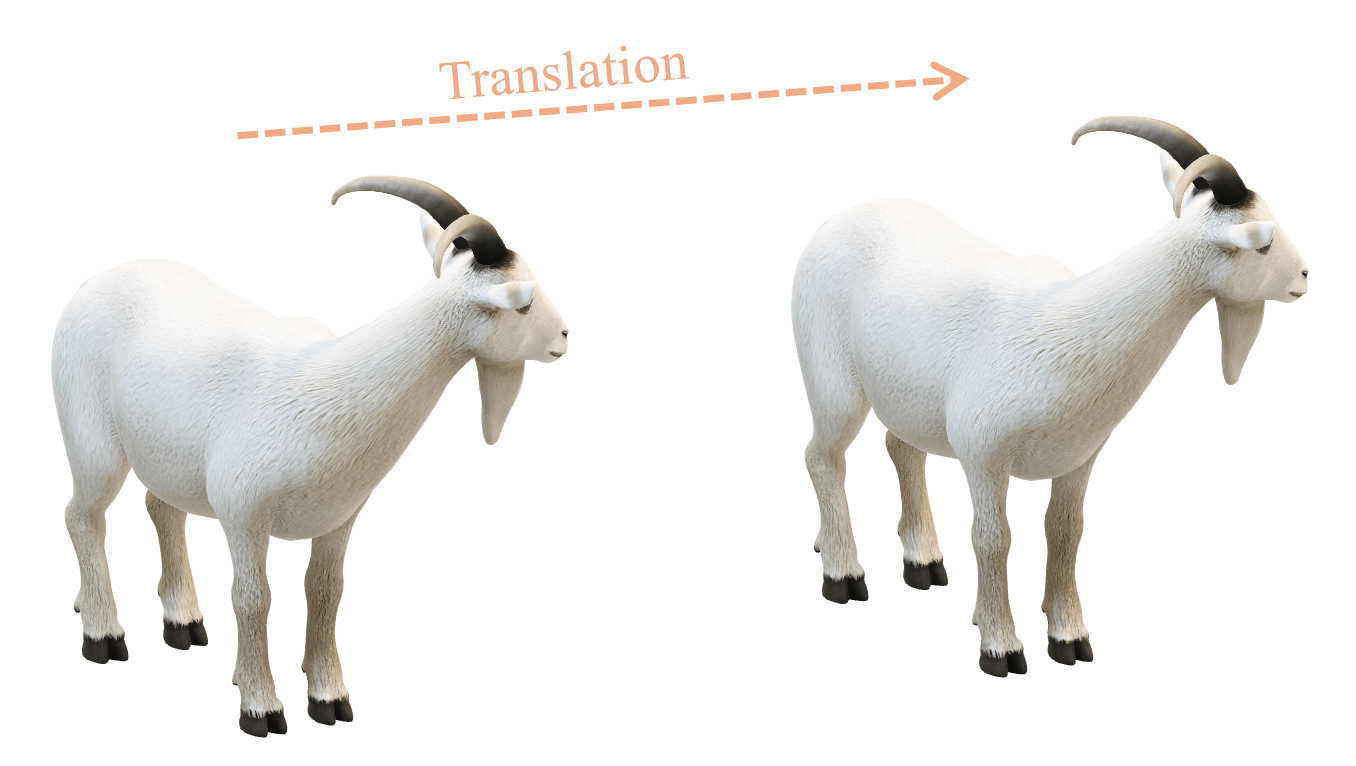
Lattice Translation
This is the operation of translating (moving in parallel) by a certain distance in a certain direction without changing orientation. A right hand is preserved as a right hand.
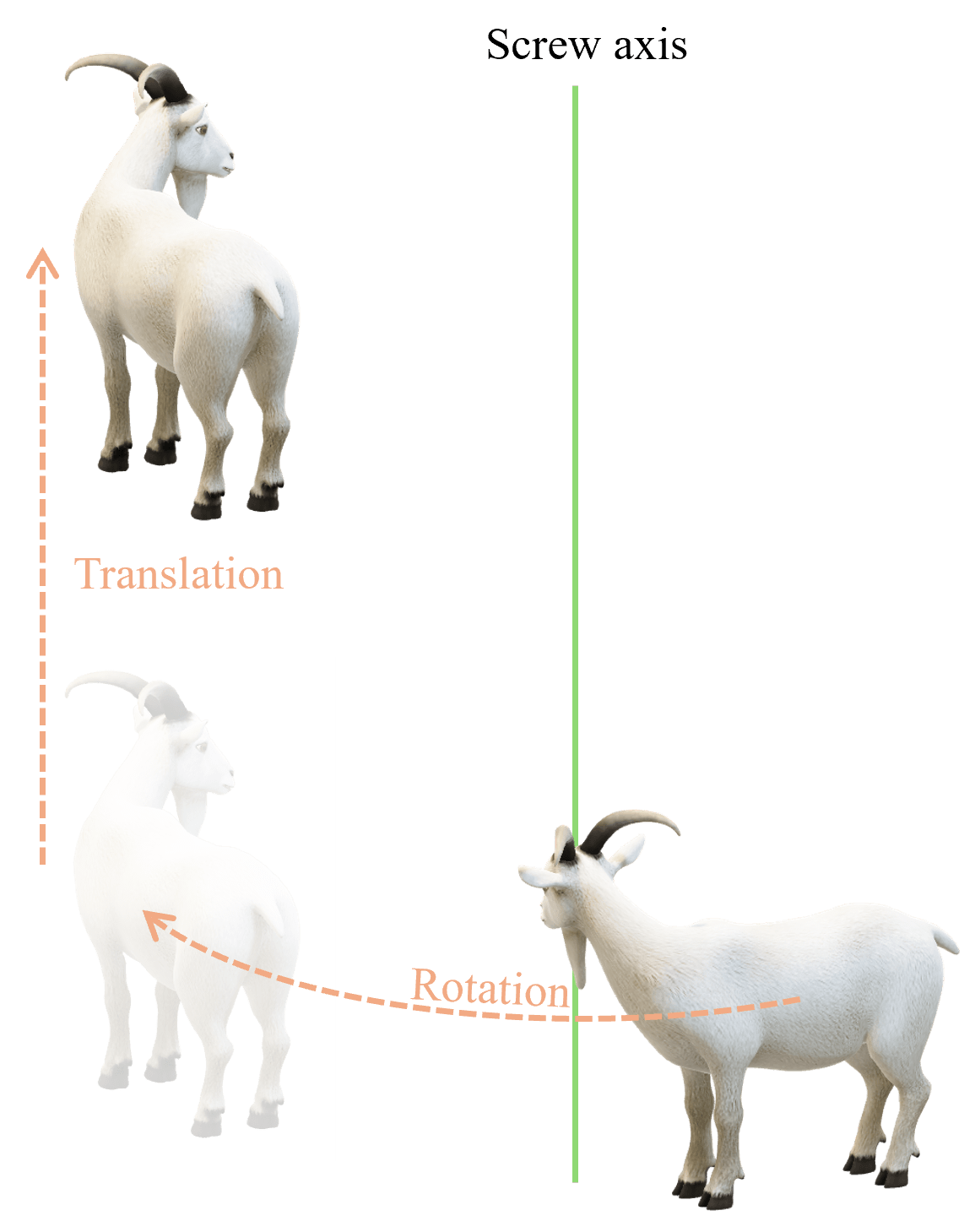
Screw
This operation consists of a rotation followed by a translation along the rotation axis. It is easy to visualize by imagining a spiral staircase. A right hand is preserved as a right hand. You might think this is merely a combination of two operations, but just as with rotoinversion, classifying it as a single operation proves convenient for various purposes.
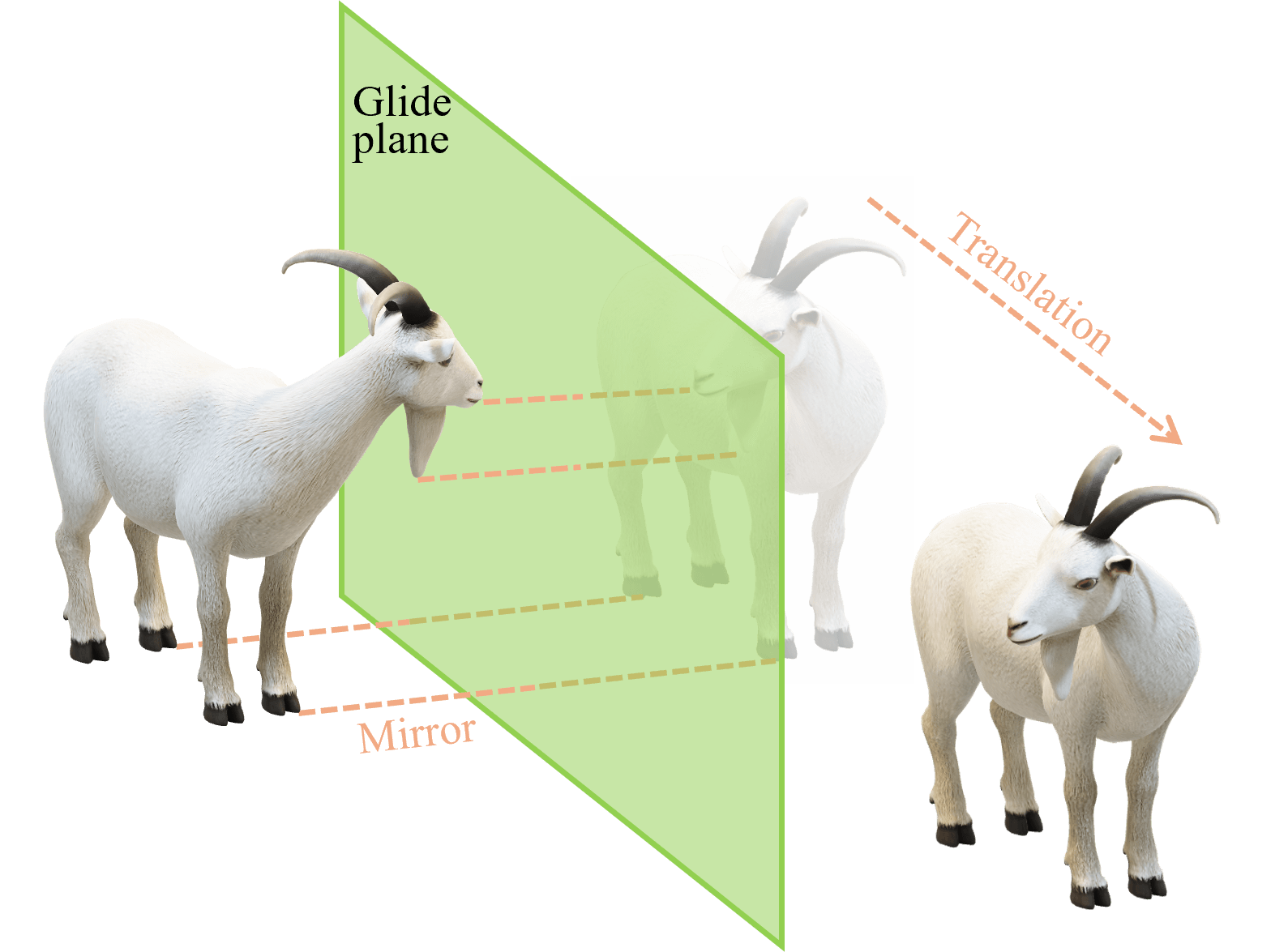
Glide Reflection
This operation consists of a reflection followed by a translation parallel to the mirror plane. A right hand is transformed into a left hand. Although it is a sequence of two operations, it is counted as an independent operation.
Summary
The operations introduced so far are all operations that rotate, translate, or reflect objects in some way to leave them invariant. They are collectively called isometric transformations (or isometries) (for details, see the page “2.1. Matrix Representation of Symmetry Operations and Seitz Notation“).
There are five types of symmetry operations without translation: identity, inversion, reflection, rotation, and rotoinversion. It is worth noting that the identity operation is identical to a 360° rotation, and that inversion and reflection are special cases of rotoinversion — understanding this will deepen your comprehension of the symmetry element notation explained later. On the other hand, there are three types of symmetry operations with translation: lattice translation, screw, and glide.
The symmetry operations described in this section are all the possible symmetry operations in three-dimensional space. You might be surprised at how few there are, but that is simply how it is.
Symmetry Elements
For example, every object in the world is invariant under the identity operation, and a regular tetrahedron is invariant under 120° rotation, 240° rotation, reflection, and so on. However, symmetry operations are merely operations (actions such as rotating or translating), not properties or elements possessed by the object itself. Then, what do we call the property of an object that permits certain symmetry operations? This is the concept of “symmetry elements.”
A symmetry element is a virtual point, line, plane, etc. that exists at the position where a symmetry operation takes place and possesses the properties of that operation (reflection, rotation, etc.). In the diagrams explaining symmetry operations, these are depicted as green points, lines, and planes. They are, of course, virtual concepts that do not physically exist, but why is it necessary to introduce this concept? Let us explain with a simple example.
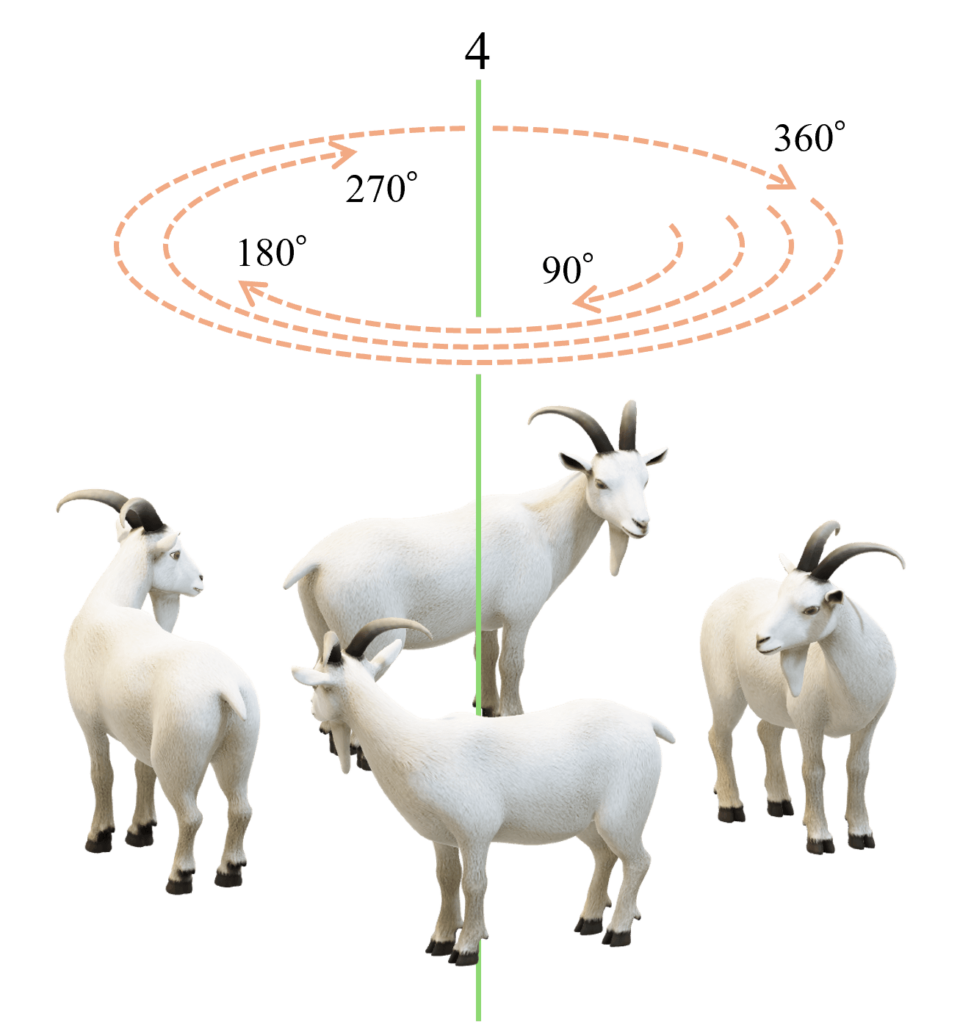
Suppose there is a figure that remains invariant under a \(\pi/2=90^\circ\) rotation. If a \(\pi/2\) rotation is permitted, then naturally \(\pi=180^\circ\), \(3\pi/2=270^\circ\), and \(2\pi=360^\circ\) rotations must also be permitted. In other words, a state that permits all four of these operations is necessarily realized. However, it would be tedious to describe this figure’s symmetry as “a figure that is invariant under rotations of \(90^\circ\), \(180^\circ\), \(270^\circ\), and \(360^\circ\).”
This is where symmetry elements come in. We consider that this figure possesses a symmetry element “\(4\),” represented by the virtual green line. The element “\(4\)” encompasses four operations (\(90^\circ\), \(180^\circ\), \(270^\circ\), and \(360^\circ\) rotations), and the figure remains invariant under any of these four operations around this element (line). By introducing symmetry element notation, the symmetry of this figure can be expressed in just one phrase: “possesses \(4\).”
A “symmetry operation” is an operation that leaves an object invariant, while a “symmetry element” is a property possessed by an object. These are easily confused concepts, but being able to properly distinguish between them is quite useful.
Note that while symmetry elements were described as “points, lines, planes, etc. existing at the position where symmetry operations take place,” there are exceptions. First, the symmetry element corresponding to the identity operation does not have a definite geometric shape such as a point, line, or plane (if anything, it exists everywhere in space). Second, the translation element is a symmetry element that every crystal necessarily possesses, but it does not exist at a specific location; rather, it has the properties of a vector defined only by direction and magnitude, and is nothing other than the concept of the unit cell.
Notation for Symmetry Elements
Below, we present the internationally standardized notation for symmetry elements established by the International Union of Crystallography (IUCr). We restrict ourselves to symmetry elements that appear in crystals (objects possessing translational symmetry). Symmetry elements are denoted by numbers and letters, with the rule that numbers are not italicized, while letters are italicized. The notation for symmetry operations generally uses Seitz notation, which is based on the symmetry element notation presented below, so be sure to understand this first.
Symmetry Elements Without Translation
| Name | Notation | Description |
|---|---|---|
| Identity | \(1\) | Equivalent to a 360° rotation |
| Inversion center | \(\bar{1}\ (=i)\) | Equivalent to a 360° rotoinversion Sometimes written as \(i\) |
| Mirror | \(m\ (=\bar{2})\) | Equivalent to a 180° rotoinversion |
| Rotation | \(2\), \(3\), \(4\), \(6\) | Expressed by the order (360°/rotation angle) |
| Rotoinversion | \(\bar{1}\ (=i)\), \(\bar{2}\ (=m)\), \(\bar{3}\), \(\bar{4}\), \(\bar{6}\) | Expressed by the order (360°/rotation angle) |
Rotation elements and rotoinversion elements are expressed not by the rotation angle itself, but by the value “360° ÷ rotation angle.” This is called the order of the rotation or rotoinversion.
A rotation element is denoted simply by its order. For example, in the case of \(4\), it is pronounced “four” or “4-fold rotation.” A rotoinversion element, on the other hand, is denoted by placing a bar over the order. For example, \(\bar{4}\) is pronounced “bar four” or “4-fold rotoinversion.”
Symmetry Elements With Translation
| Name | Notation | Description |
|---|---|---|
| Lattice translation | \(P\) \(A, B, C\) \(I\) \(F\) \(R\) | Primitive lattice Base-centered lattice Body-centered lattice Face-centered lattice Rhombohedral lattice |
| Screw | \(2_1\) \(3_1\), \(3_2\) \(4_1\), \(4_2\), \(4_3\) \(6_1\), \(6_2\), \(6_3\), \(6_4\), \(6_5\) | The first digit represents the order of rotation, and the second digit represents the translation fraction (Translation amount = period along axis × second digit / first digit) |
| Glide | \(a\), \(b\), \(c\) \(n\) \(e\) \(d\) | Axial glide plane Diagonal glide plane Double glide plane Diamond glide plane |
Symmetry elements with translation exist only in crystals. Not only the ordinary translation element, but also screw and glide elements can only exist within crystals.
Translation elements are represented by uppercase letters. There are seven symbols — \(P, A, B, C, I, F, R\) — which denote the type of unit cell. The meaning of these symbols will be explained on the next page, “1.3. Lattice Parameters, Crystal Systems, and Bravais Lattices.”
Screw elements are represented by two numbers. The first number (normal size) corresponds to the order of rotation, and the second number (subscript) corresponds to the translation amount. The direction of a screw axis always coincides with the direction of a translation vector (a vector connecting lattice points) in the crystal1. The translation amount of a screw element is defined as “second digit / first digit” of the minimum period along the screw axis. For example, a crystal possessing the symmetry element \(4_3\) is kept invariant by the operation “rotate 90° and advance 3/4 of the period along the axis.” It is pronounced, for example, “four sub three (screw)” for \(4_3\). The detailed behavior of individual screw elements will be discussed on the page “3.1. Symmetry Elements in Detail.”
Glide elements are represented by lowercase italic letters. The letter indicates the direction and amount of translation. Individual glide elements will also be explained in detail on the page “3.1. Symmetry Elements in Detail.”
Footnotes
- If a screw axis were placed in a direction that does not coincide with a translation vector, new symmetry elements would be generated one after another, and when a new unit cell is established taking those into account, the screw axis would end up coinciding with a translation vector after all. ↩︎